interview by
Industrial-Automation
June 24, 2017
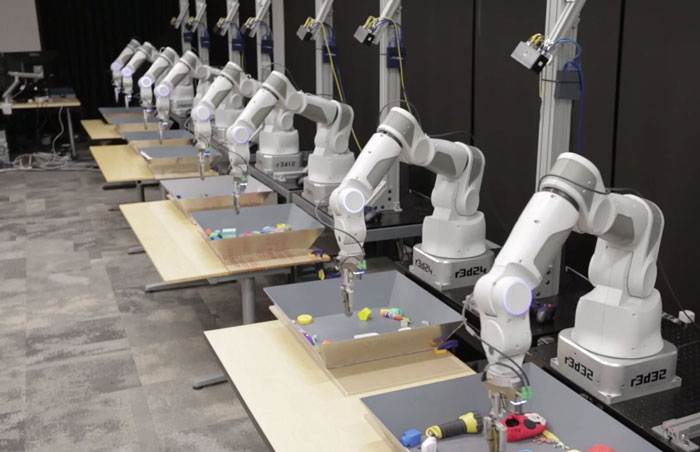
In this episode, Audrow Nash interviews Sergey Levine, assistant professor at UC Berkeley, about deep learning on robotics. Levine explains what deep learning is and he discusses the challenges of using deep learning in robotics. Lastly, Levine speaks about his collaboration with Google and some of the surprising behavior that emerged from his deep learning approach (how the system grasps soft objects).
In addition to the main interview, Audrow interviewed Levine about his professional path. They spoke about what questions motivate him, why his PhD experience was different to what he had expected, the value of self-directed learning, work-life balance, and what he wishes he’d known in graduate school.
A video of Levine’s work in collaboration with Google.
Sergey Levine
Sergey Levine is an assistant professor at UC Berkeley. His research focuses on robotics and machine learning. In his PhD thesis, he developed a novel guided policy search algorithm for learning complex neural network control policies, which was later applied to enable a range of robotic tasks, including end-to-end training of policies for perception and control. He has also developed algorithms for learning from demonstration, inverse reinforcement learning, efficient training of stochastic neural networks, computer vision, and data-driven character animation.
Links
Download mp3 (16.0 MB)
Download extra mp3 (7.1 MB)
Sergey Levine’s website
Subscribe to Robots using iTunes
Subscribe to Robots using RSS
Algorithm AI-Cognition Manipulation podcast Research Robotics technology
follow Robots Podcast:
itunes
237: Deep Learning in Robotics, with Sergey Levine
236: IASP 2016 (Part 3 of 3), with Vadim Kotenev and Vagan Martirosyan
235: Locus Robotics, with Rick Faulk
234: IASP 2016 (Part 2 of 3): Trik Embedded Platform, with Roman Luchin
233: Geometric Methods in Computer Vision, with Kostas Daniilidis
232: Kickstart Accelerator, with Roland Siegwart and Matthias Hüni
231: CUBE Tech Fair, with Torsten Oelke
230: bots_alive, with Bradley Knox
229: IASP 2016 (Part 1 of 3), with Albert Efimov, Anastasia Uryasheva and Borris Rozman
228: RoboUniverse Conference – Drones, AI, and 3D printing (Part 2 of 2), with Dr. Douglas Stow, Dr. Eugene Izhikevich and Cullen Hilkene
227: RoboUniverse Conference – Agricultural Robotics (Part 1 of 2), with Dan Harburg and Matthew Borzage
226: Toru robots, with Dr. Moritz Tenorth
225: A Wearable Robotic Extra-Finger for Grasp Compensation, with Domenico Prattichizzo
224: Speech-controlled Wheelchair, with Vladimir Stanovov
223: Actuation for Robotic Fingers, with Edward Neff
222: 100/100 Computer Vision Challenge, with Dieter Fox
221: Ori Systems: Robotic Furniture, with Hasier Larrea
220: Teach Xemo to Move, with Jeff Sprenger
219: ICRA 2016: Landmine Detection Challenge, with Edson Prestes
218: RSS 2016 Posters, with Gangyuan Jing, Rico Jonschkowski, Matthew Gombolay and Dorsa Sadigh
217: LunaRoo, with Jürgen Leitner
216: ExoAtlet: Exoskeleton for Rehabilitation, with Ekaterina Bereziy
215: Human 2.0: Exoskeletons and Orthoses, with Hugh Herr
214: Project Ngulia: from Phone to Drone, with Fredrik Gustafsson
213: Physics-based Optimization for Robot Control, with Emo Todorov
212: Self-driving Cars: From Research to Road, with Karl Iagnemma
211: ICRA 2016 Exhibition (Part 2 of 2), with Greg Burman, Dave Rollinson, Tony Prescott and Xavier Carpentier
210: ICRA 2016 Exhibition (Part 1 of 2), with Scania, PAL Robotics, Husqvarna and AnyBody Technology
209: INNOROBO 2015 Showcase, with RB 3D, BALYO, Kawada Robotics, Partnering Robotics, and IRT Jules Verne
208: Ladybird, with James Underwood
↳ more Robots Podcast episodes